Docker存储驱动DeviceMapper
13 Mar 2017上篇介绍了Docker存储驱动aufs以及AUFS文件系统,本篇聊聊devicemapper存储驱动以及Device Mapper技术,Device Mapper较之AUFS工作相对底层。
Device Mapper是一种Linux块设备映射技术框架
Device Mapper不同于AUFS、ext4、NFS等,因为它并不是一个文件系统(File System),而是Linux内核映射块设备的一种技术框架。提供的一种从逻辑设备(虚拟设备)到物理设备的映射框架机制,在该机制下,用户可以很方便的根据自己的需要制定实现存储资源的管理策略。
当前比较流行的 Linux 下的逻辑卷管理器如 LVM2(Linux Volume Manager 2 version)、EVMS(Enterprise Volume Management System)、dmraid(Device Mapper Raid Tool)等都是基于该机制实现的。
值得一提的是Device Mapper工作在块级别(block),并不工作在文件级别(file)。Device Mapper自Linux 2.6.9后编入Linux内核,所有基于Linux内核2.6.9以后的发行版都内置Device Mapper。
起初Docker仅在Ubuntu和Debian上使用AUFS运行,在Docker火起来后,另一个Linux大户Redhat家族也想使用Docker,但是由于AUFS并未编入Linux内核,也并未写入Redhat家族内核,所以包括RedHat和CentOS均无法使用Docker。RedHat开发人员曾想把AUFS写入内核以支持Docker,但最终还是选用的Device mapper作为后台存储技术,而Docker方面重新设计了Docker引擎以支持多种驱动,并开发devicemapper存储驱动支持Device Mapper作为后台存储。
Device Mapper主要分为用户空间部分和内核空间部分
用户空间相关部分主要负责配置具体的策略和控制逻辑,比如逻辑设备和哪些物理设备建立映射,怎么建立这些映射关系等,包含device mapper库和dmsetup工具。对用户空间创建删除device mapper设备的操作进行封装。
内核中主要提供完成这些用户空间策略所需要的机制,负责具体过滤和重定向 IO 请求。通过不同的驱动插件,转发IO请求至目的设备上。附上Device Mapper架构图。
Device Mapper技术分析
Device Mapper作为Linux块设备映射技术框架,向外部提供逻辑设备。包含三个重要概念,映射设备(mapped device),映射表(map table),目标设备(target device)。
映射设备即对外提供的逻辑设备,映射设备向下寻找必须找到支撑的目标设备,映射表存储映射设备和目标设备的映射关系。目标设备可以是映射设备或者物理设备,如果目标设备是一块映射设备,则属于嵌套,理论上可以无限迭代下去。
简而言之,Device Mapper对外提供一个虚拟设备供使用,而这块虚拟设备可以通过映射表找到相应的地址,该地址可以指向一块物理设备,也可以指向一个虚拟设备。
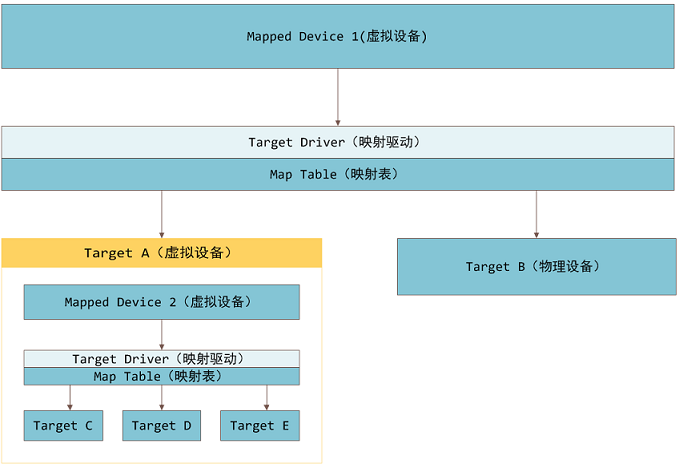
映射表,是由用户空间创建,传递到内核空间。映射驱动在内核空间是插件,已实现的映射驱动(target driver) 插件包括软 raid、软加密、逻辑卷条带、多路径(mulitpath)、镜像(mirror)、快照(snapshot)等。
Device Mapper中的IO流处理,从虚拟设备(逻辑设备)根据映射表并指定特定的映射驱动转发到目标设备上。
Docker中的Device Mapper核心技术
Docker的devicemapper驱动有三个核心概念,copy on-write(写复制),thin-provisioning(瘦供给)。snapshot(快照),首先简单介绍一下这三种技术。
CoW(copy on write)写复制,一些文件系统提供的写时复制策略,AUFS文中已介绍,不赘述。devicemapper支持在块级别(block)写复制。
Snapshot(快照技术),SNIA定义:关于指定数据集合的一个完全可用拷贝,该拷贝包括相应数据在某个时间点(拷贝开始的时间点)的映像。快照可以是其所表示的数据的一个副本,也可以是数据的一个复制品。而从具体的技术细节来讲,快照是指向保存在存储设备中的数据的引用标记或指针。
接下来的档案修改或任何新增、删除动作,均不会覆写原本数据所在的磁盘区块,而是将修改部分写入其它可用的磁盘区块中。device mapper映射驱动支持snapshot技术。
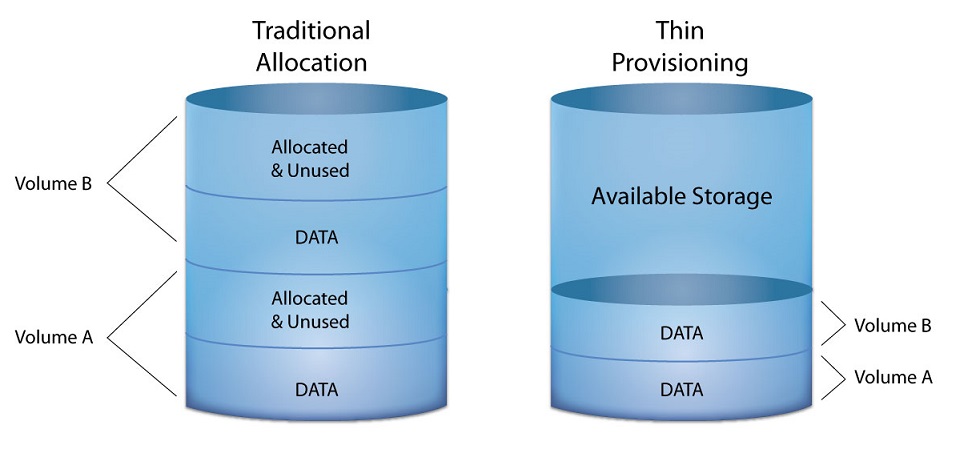
Thin-provisioning(瘦供给),直译为精简配置,《容器与容器云》(浙大SEL实验室著)同译为精简配置,但个人认为瘦供给更易理解,瘦供给是动态分配,需要多少分配多少,区别于传统分配固定空间从而造成的资源浪费,附下图
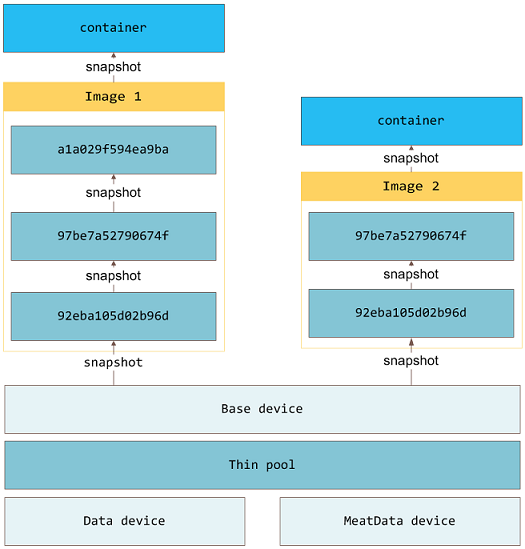
Docker中devicemapper驱动存储
- 首先创建一个瘦资源池(thin pool,使用瘦供给技术,存储动态分配),瘦资源池使用2块设备,一个用于存储数据,一个用于存储元数据(虚拟设备和目标设备的映射表)
- 基于该瘦资源池创建基础设备(Device Mapper中的逻辑设备)
- 所有的镜像数据均基于该基础设备创建快照,容器层则基于镜像层创建快照。
 Tips:Docker在创建瘦资源池(thin pool)的时候,默认使用loop-lvm模式,该模式使用稀疏文件构建资源池。另一种模式是direct-lvm模式,该模式使用块设备创建资源池。docker模式采用loop-lvm是因为不需要额外配置,而在生产环境中建议使用direct-lvm模式,该模式需要手动配置数据设备从而构建瘦资源池。
Tips:Docker在创建瘦资源池(thin pool)的时候,默认使用loop-lvm模式,该模式使用稀疏文件构建资源池。另一种模式是direct-lvm模式,该模式使用块设备创建资源池。docker模式采用loop-lvm是因为不需要额外配置,而在生产环境中建议使用direct-lvm模式,该模式需要手动配置数据设备从而构建瘦资源池。
使用devicemapper的读写操作
devicemapper使用snapshot快照技术,每层镜像都是基于上一个镜像的快照构建。所有读取数据操作,如果数据在低层快照中,则会重定向到低层快照数据地址并取出数据。写数据会向瘦资源池(thin pool)请求空间写数据,由于devicemapper工作在block层,空间分配以块为单位,docker中默认块大小为64KB。
镜像的复用即通过snapshot快照技术实现,有别于aufs等存储驱动。所有的新增和删除都是不覆盖原本数据块,而是使用其他可用的新的数据块进行操作。
总结
存储空间节省:由于工作在block级,每一个block 64KB,尤其是在更新大文件的时候,不需要复制整个文件,只需要更新文件有修改所在的block,有效节省存储空间。
存取速度:devicemapper逻辑设备映射目标设备,目标设备构建于SSD等高速存储上,能获得更好的速度。
兼容性好:由于Device Mapper从Linux 2.6以后就写入内核,所以尽管发行版不同,但都能使用devicemapper驱动。
内存资源浪费:启动N个相同的容器会加载N份相同文件到内存,势必造成主机资源浪费,不建议在PaaS或者资源密集场合使用。
Tips:关于资源浪费,因为devicemapper工作在block,很难实现pagecache
参考资料
- https://docs.docker.com/engine/userguide/storagedriver/device-mapper-driver/#device-mapper-and-docker-performance
- https://www.ibm.com/developerworks/cn/linux/l-devmapper/
- http://coolshell.cn/articles/17200.html
- https://www.kernel.org/doc/Documentation/device-mapper/
- http://hustcat.github.io/overlayfs-intro/
- https://en.wikipedia.org/wiki/Device_mapper